pixelmech
-
Posts
1,323 -
Joined
-
Last visited
Content Type
Profiles
Forums
Events
Everything posted by pixelmech
-
Rotoscopes for new Crow character
pixelmech replied to pixelmech's topic in Work In Progress / Sweatbox
That rings a bell, but like you say - we have to consider it when modeling the head. I tend to find (in my extremely limited experience) that the side view does most of the defining anyway, except for widths. Understood. I just wanted something more defined than...nothing! I didn't exactly set out to do it in Illustrator, it just ended up that way because doing the front view to match the side view came along easier than drawing it for some reason. I think it's because my drawing skills are woefully out of date. Yes! I had figured I would do that, a little forethought and all that. Thanks for the insight. And where do you take a 3D robot for repairs these days? Why, to Morgan at Anzovin, of course- where else? (Long story) -
Agree with what has been said, and I too think the feet are too small. Look down at your own and check the proportions - unless that is by design of course. I do think you have too much splinage especially in the legs, I go in and remove every other one, making sure you have 3 for the knee area. Open up some of the AM models and look at the legs, a good way to learn. Tom
-
The match looks great. My only comment is that it burns a smidge too fast, and the flame needs to get smaller and just barely "hang on" to the stick at the end. If you look at burnt matchsticks, you'll see they rarely burn all the way down, they tend to go out at about the 70-80% mark. I know this is off topic, but Ed I love the boids stuff! I can watch those movies over and over - is the whole thing available somewhere or is it just a series of shorts?
-
While I'm waiting to get my Robot fixed I began working on these rotoscopes. They are inspired/copied from an old Golden Age cartoon "The Fox and the Crow." I've always loved crow characters. I found when I was doing my robot that not having a rotoscope was too much freedom and not enough structure, and I got bogged down since I had no direction so I'm hoping this will help. I want a decent rotoscope that will help me plan out the splines, which was another issue I had. Someone said (I think it was the guy who did the Osprey) that you should always work from a rotoscope. Anyway, here it is - any comments are appreciated that you think might improve it, or anything I might be missing. It's certainly a bit rough, and the top beak view was very difficult for me. I sketched it first then lined it in Illustrator. Tom

-
Thanks! It's funny, the first half of the walk looked a lot better before I began the mirroring, which was frustrating. I tried to add in what was missing but it obviously didn't work, so I know what you mean about the 'jerk' missing. Agreed on the arms too, and it was so hard to move because the forearm disconnected from the upper arm when I moved them, going to post in Anzovin about that. I will try your suggestion though about the shoulders, good point about the elbows.
-
Ok, uploaded a new version (link below here too). I think its a lot better but I'm still having an issue with my rig and bones either separating or floating. Going to see if Anzovin can help me. I think I get the linear thing on the foot, it looks better. Anyway, I've been reading Richard Williams' "The Animator's Survival Kit" and I just got to the walk section, and it really helped me understand some things. Instead of building this cycle the way the AM book does, I did it one way Williams does. I did the 2 contact positions first (at 0 at 20) The the passing position at 10. Then I filled in the two other positions at 5 and 15. It was much easier this way. The wierd thing was I had a problem when I pasted my keyframe > mirrored keyframes. They didn't come out exactly the same, and it seemed to not paste all the keyframes of the bones. Then when I tried to redo it, I couldn't figure out how to get back to 20 and get all the junk that was at 25. I'm going to redo it again, but any C&C on this one is appreciated. Thanks! Tom w2s.mov
-
You are absolutely right Mike and I have been saving like a lunatic so its not a big deal. Time to bust up me some glass unicorn...control points...or something...
-
WOW - what a tool! Thanks for the tip. I have to say that I am, at the moment, REAL unsure when working with the CPs in the timeline. I guess that comes with experience, but it's so much more intuitive to work with the model. But I can see why it is necessary and makes a big difference, so I am going to have to figure it out. I'm still unsure though of WHAT bone/control to modify in the timeline (as stated above.) And I don't necessarily want him to be super robotic looking even though he is one. T
-
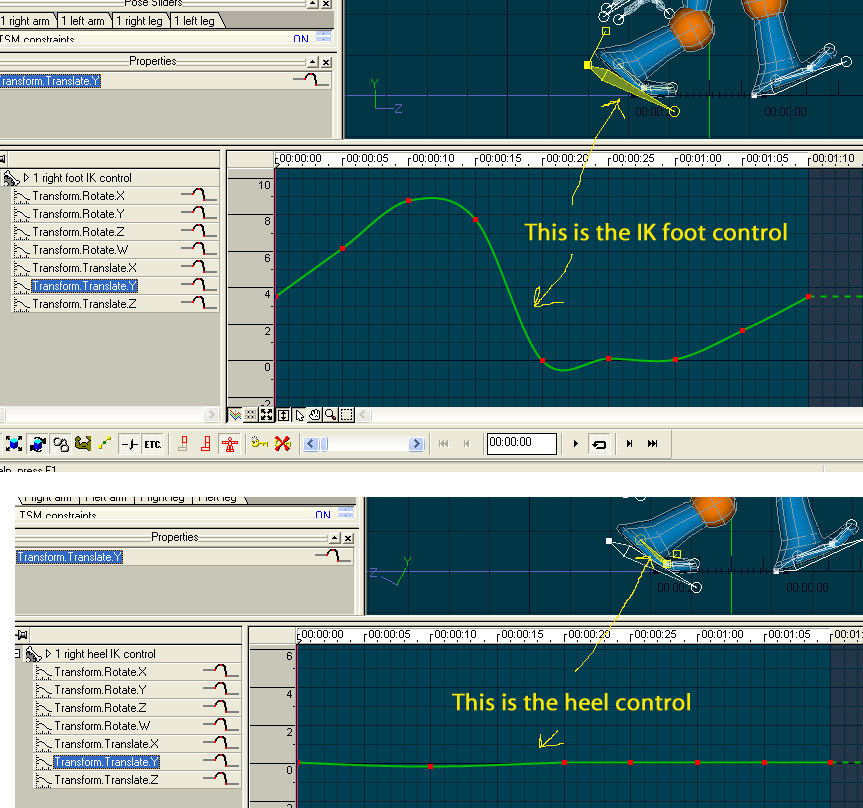
Ok, I tried tweaking like you said but I'm not really getting what I need. Am I to be doing this to the IK foot control or the heel bone? See pic below. Also, am I in the right place? Would I grab all of those keys and linear them? Or just the ones where it moves along the ground?
-
Ahhh...I shall try that. Thanks Hmm.. you mean other than the fact that I'm a bad animator? No. And I didn't fully realize it until you said it. Yeah...hovering....hmmm
-
I figured I would post him here, I'm going to try and get him as a workable character. This is my first real character (I scrapped the one I was working with during the tutorials). The TSM rig works good, but you'll see some issues I have, notably with the foot in front on top not looking right. If you saw him in the other thread, you might notice shorter arms, thicker wrist, no neck and different feet. This first one is a test walk. Some issues I have: - His feet descend below ground level between keys. I'm not sure why. On all the keys his feet are on the line. - He's got flat feet syndrome big time. I think this is a model and rig issue. - Not really any follow through going on, he doesn't have much being a robot. I tried to 'flip' his hands a bit. - Isn't there some trick right before the last frame of the cycle to smoothen out the walk? I was pretty careful setting the keys but I didn't really do any tweaking yet, I wanted to get some feedback (and I'm really tired!) Note that I didn't shoot for a mechanical/robotic feel - although he is a bit stiff. Eventually my robot characters are for a show for children and I want the characters to be loose for the most part. C&C welcome and needed... EDIT: New walk file 2/2 Larger version of Walk3 at: http://www.pixelmech.com/rev/walk3-bigger.mov walk3.mov
-
Nice job on the head. The ears look like concentric circles. I'm not familiar with the actual character so maybe this matches him - but it doesn't have the look of an ear. Study your own in a mirror They are definitely not symmetric. Hair looks like you put a lot of work into it, good job.
-
Love the trailer! The bullet time effect is great Looking forward to seeing more. Great job on the kitchen cabinets.
-
Character Head WIP for my Star Wars Fan Film
pixelmech replied to reddynamite's topic in Work In Progress / Sweatbox
Awesome noggin! Really really well done! I'm diggin the strong chin. He's the leader-type! -
Love the tree, great job
-
Ok, finally got a version rigged that seems to work good enough to play around with (phew). Part of the problem was the way I had the model built, so I made some adjustments that seemed to really help. Here's a quick goofy pose with the TSM rig working. I'm going to try my hand at a walk cycle tonight..maybe something else...
-
I like the shoes!
-
10 second club entry December 2004
pixelmech replied to shaunf's topic in Work In Progress / Sweatbox
And links to this information? Sounds like it would be a good read. Nice job on the short, I enjoyed. I too was confused about the fish talking - can you explain why he is? I must be stupid, I don't get it! -
arggh! The PRESSURE! LOL. I don't feel like I can animate him til I get the rig done right, you know? But I think I'm getting close....wait...I think I said that already... Ok Ok...soon...soon...
-
And the shoulders....
-
Here's an update. I ended up putting balls at the thigh as well. Might at the shoulders. Problem is I'm having a hard time rigging "mechanically" without getting deformations. Doesn't help that I'm brand new at this. Anyway, hiding the joints is cheating I guess, but I follows the robot look (Kind of a Robbie the robot thing) and allows it to kind of look like robot joints (the ball stays still while the joing moves "in" it) and hides the deformation too. Added a ring around his helmet.
-
Look is no good...went into that directory too and no file...
-
Thanks Doug I'm going to work on it some more tonight.
-
Added the balls to the finger joints and made the hands 20% smaller which I think helps.
-
ROTFL :) Yeah, no kidding, keep me outta there! I have to decide what to do with the hands first. Then I have to finish the rig too, which means going through the contraints chapter in Davids book. So it might be awhile, but I will post any model updates here for a bit. Thanks everyone for the input. Tom