fraizer
-
Posts
40 -
Joined
-
Last visited
-
Days Won
7
Content Type
Profiles
Forums
Events
Everything posted by fraizer
-
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
Additional slit-scan material is in post "Mandelbrot Circle Slit-Scans and More": Included there is the description of a generalized method for simulating slit-scans, both symmetrical and asymmetrical. And files. -
After doing the 2001 slit-scan project (https://forums.hash.com/topic/53303-2001-slit-scan-effects-simulated-in-am-with-mufoof/) using resurrected 2001 artwork (https://youtu.be/dujQGB-2EXw), I wanted to try some other graphics. The Mandelbrot Set is a wonderful source of interesting imagery. My college roommate, Mike Segor, who also went to that 1968 showing of 2001, had sent me some Mandelbrot work. Grist for the mill. He also contributed music for the final movie. The artwork: John Knoll has a fascinating video about slit-scan techniques (and shows a graphic of the Trumbull 2001 set-up at 5:07): https://vimeo.com/391366006 He discusses various approaches including circular slits and other, similar, symmetrical geometry like the Dr. Who Tardis/police call box/tunnel sequence. For this experiment, I decided to start with the 2001 slit-scan technique and then try circular slits. Did not use the soft-edged slit approach as much rendering on this project was complete before that idea was tested. The movie breaks down into these parts: Vertical slit scan created on left half of screen, flipped and inverted onto right half of screen; Composite=Add. Has the expected acceleration effect created by moving the slit-screen model element across the artwork during MUFOOF frames and moving the artwork between frames: Circular slit scan (full screen effect), artwork movement between frames; has sweep, is pretty, but no dynamic acceleration: Another circular slit scan clip overlaid on first circular slit scan clip with Composite=Difference; more dynamic because of counter-movement, but no real acceleration: Circular slit scan with slit-screen movement Right to Left during each MUFOOF frame, artwork movement between frames; has dynamic acceleration but is asymmetrical: Circular slit scan, slit-screen movement diagonally Lower Left to Upper Right during each MUFOOF frame, artwork movement between frames; has sweep and dynamic acceleration but is also asymmetrical: I made other attempts at a symmetrical set-up, but they did not give a dynamic acceleration effect: 1. Moving artwork away from camera faster than slit-screen (z-axis), exposing more artwork, in each MUFOOF frame; moving artwork between frames (x-axis). 2. Changing size of circular slit, exposing more artwork, in each MUFOOF frame; moving artwork between frames. 3. Moving circular slit from below centerline to above centerline in each MUFOOF frame; moving artwork between frames. Has the virtue of being symmetrical horizontally, though not vertically: 4. No slit, just an open circle in screen and no movement of screen in MUFOOF frames; moving artwork between frames. Has sweep but no acceleration: I wanted to try one more effect before giving up on finding a symmetrical set-up that would give dynamic acceleration — rotation of artwork 360 deg around the z-axis during MUFOOF frames, moving artwork left to right between frames, and using the open circle shown above. This idea went down a whole new rabbit hole where I spent several days, but it led to what appears to be a generalized solution for simulating slit-scans that create dynamic motion. Initial results looked very strange. Then I realized that as the animation progresses, the artwork moves left to right as intended but the rotation point travels with the artwork and rotates it out of the camera FOV. After thinking about that problem, I decided the solution might be an additional bone to rotate the artwork (which I named Pivot) while the artwork itself is assigned to a child bone of the Pivot bone. That worked and the result has dynamic acceleration. A still from the final part of the movie: Here is the movie: https://youtu.be/aD8xUaaGIF4 Here are files for the open circle scan with pivot rotating the artwork 360 deg during each MUFOOF frame, artwork movement Left to Right between frames: circle-no-slit-scan-MUOOF-backward-mandelbrot1-rotateArt360-sys3.chocircle-no-slit-art-sys-MUOOF-backward-60sec-rotateArt360-sys3.actcircle-slit-screen-backward-artwork-moveL2R-sys3.actcircle-no-slit-screen-art-mandelbrot1-system03.mdlcircle-no-slit-mandelbrot1-rotateArt360-sys3.pre Mandelbrot artwork appears above. But wait, there’s more. After successfully moving the artwork in relative space using the parent Pivot bone and then moving it in absolute space using the child bone in the second action, I realized this approach could be used for any slit scan animation, including the original 2001 project. Proved to be a bit more complex than that simple statement. I revised the 2001 slit-screen/artwork model with a new parent bone (Pivot) for the Artwork child bone. Now the slit would be stationary, the artwork would move 6” during MUFOOF frames, and the artwork would be moved an absolute amount between frames. Test renders did not look right. In the old method, the slit-screen element moved and the artwork was stationary. In the new method, the slit-screen is stationary. Where should that slit be located? For simplicity I decided to try changing the camera location on the x-axis. Eventually I found that moving the camera +3” on the x-axis gave test renders that were substantially similar to the previous 2001 slit-scan results. However, the image did not reach all the way to the center of the screen. Time to modify the model and MUFOOF action to allow for further experimentation. I added a new bone (System2) to the slit-screen/artwork model to be the parent of all model elements so I could move the whole model during the MUFOOF action. At action start, the model was located at -3” on the x-axis (and the camera was returned to zero in the cho). I experimented with end-of-action values for bone System2; eventually +3” gave the desired result — these are the same values as in the original move of the slit-screen element, except now we are moving the whole model during MUFOOF frames. This model move is analogous to panning the camera slightly during its travel down the track which Trumbull mentioned. Here are revised 2001 slit-scan files using the new method: soft-slit-scan-backward-2001artwork-60sec-PivotSystem2.chosoft-slit-screen-2001artwork-system2.mdlsoft-slit-screen-backward-2001-artwork.actsoft-slit-screen-MUFOOF-backward-60sec-movePivotR2Lsys2L2R.actsoft-slit-artwork01.tgasoft-slit-scan-backward-2001artwork-60sec-PivotSystem2.pre Here is the movie created using the new method which is substantially similar to the demo movie of the soft-edged slit-screen in the 2001 post: soft-slit-scan-backward-2001artwork-60sec-PivotSystem2.mov As the I Ching says, persistence in a righteous course brings reward.

-
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
Before we venture off to FractalLand, here is a complete re-render and re-edit of the 2001 slit scan movie using the transparency map approach suggested by Robert. The distinct banding is mostly or completely eliminated. Where banding does appear, it looks like it is part of the effect, not a hard-edged standing wave. https://youtu.be/dujQGB-2EXw 2001-soft-edge-slit-scan-composite.mov -
The Mini I am running v17 on is late 2012 vintage, CPU = 2.3 GHz Intel Core i7 (4 cores), GPU = Intel HD Graphics 4000 768MB. Apple offers Minis in several configs; more $$$ = more CPU speed and more cores, better GPU, more memory. They are essentially sealed boxes not intended for end-user reconfigs, though I am sure there are folks out there who do that sort of thing. Laptops same scheme. Apple does make PC tower equivalent machines that can be config'ed however the user wishes. I have moved away from that model as there are too many decisions to make and too many sources of potential incompatibility. I would rather make stuff. Or read a book.
-
Based on a sample of one run, NR seems to be more stable than rendering in A:M proper. This AM my MacMini (using 2 cores) finished rendering 260 frames at 4 minutes plus per frame without a program crash. Normally I would expect at least one crash during that period -- i.e., normal when doing longer, more complex renders. Thoughts?
-
Could be. Do you know what the A:M user base on the Mac platform is these days? I assume it is shrinking -- and never was all that large.
-
It's all about the bread crumbs. Success at last. I decided to not use a Preset since I had to manually enter the save path anyway. The Mac prompt window looks like this: Pressing Continue takes you to a prompt window that shows the various render icons (Final, etc.) and has an Advanced check box that when checked gives the usual Options tab: Some values seem to carry over from the Cho settings (Multi-Pass ON and # of passes, e.g.) and some values are incorrect and must be entered manually (Motion Blur % seems to default to 20%). So checking settings is wise. I think I completely overlooked the Advanced check box... Thanks (again) for your help.
-
Set Multi-pass and Motion Blur manually in NR? Not that I have seen. The "Options" menu does not seem to be available.
-
Some good clues here. I shall have to think about it. And see what I can do in AppleScript. To be clear about the .CMD question: there is no .CMD file per se. Not surprising as that is a Windows convention. I could not find an equivalent file to edit -- don't know what the Mac extension might be. I have actually done more coding in the Windows environment than Mac, but that was many years ago... The good news for now is that I should be able to use NR as long as I am not doing anything like Multi-pass and Motion Blur. More testing required.
-
Not on an annual subscription. I have always purchased the full package. The .PRE is attached. The relevant portion is here: <RenderOptions> <RenderQuality> Value=Final </RenderQuality> <Multipass> Value=TRUE <NumPasses> NumPasses=10X10Pass </NumPasses> <Soften> Soften=FALSE </Soften> </Multipass> <MotionBlur> Value=TRUE <Shutter> Shutter=70 </Shutter> </MotionBlur> The usual <something>...</something> structure. The call-outs are there, but do not seem to be executing. 2001-AW-Five-Frame0.pre
-
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
Thank you, Xtaz. MUFOOF is a brilliant technique. Robert, excellent demo of NetRender. You have given me something more to think about. -
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
I have thought about using Netrender, just never pulled the trigger. At this point, while I still use A:M a lot, I am trying to figure out how to go forward in the animation artform. Don't really want to start the learning curve on some other program. I have not looked recently, but I assume Hash is not moving forward on supporting A:M on Apple Silicon machines. I run legacy Mac gear and OS in order to use A:M (and have not bought an Apple Silicon machine) which means everything else loses functionality over time, e.g., web browsing. And don't really want to buy a PC just to run A:M... Meanwhile, here is a six second -- actually 12 seconds as it is running at 12FPS -- movie using the soft-edged slit. Looks good to me. 2001-soft-slit-Artwork01.mov Being just a bit obsessive-compulsive -- don't you have to be to do this kind of thing? -- I am re-rendering the previous material. Also, should be editing the Mandelbrot-based renders, which pose some new questions, real soon. -
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
Not using Netrender. -
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
Good observation, Robert. I was thinking "no" as well. After doing some experimenting with a narrower soft slit, I decided to go with the original approach demo'ed above. My concern was that in the course of applying the slit artwork decal I had to scale vertically and horizontally to fit the model; scaling horizontally narrowed the slit and reduced the amount of soft-edge -- not easy to make artwork 4' tall by 1" wide, not for me anyway. The real test I think is how the soft edge approach works over the span of the artwork, and how it animates. A sequence is rendering now. The soft edge does add to the render time... Here is a new set of files; a new Slit-screen/Artwork model using a TGA as a transparency map, renamed Action files, and new Cho and render Preset files; 2001 artwork is the same as above: soft-slit-screen-2001artwork-system01.mdlsoft-slit-artwork01.tgasoft-slit-screen-backward-2001-artwork.actsoft-slit-screen-backward-system-60sec.actsoft-slit-scan-backward-indy-2001-artwork-60sec-01.cho2001-Soft-Slit-Preset.pre -
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
A quick and dirty test of the transparency map/soft-edged slit idea shows promise. Needs refinement, but better and better. Good thinking, Robert.
-
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
Robert, Render Presets -- version and platform vagaries, oh my. I run v15 on my MacBkPro and do a lot of "development" in that environment. The v15 Render to File window does not have any Preset buttons at all. I always have to do the "Tools>Options>Rendering>Use Settings from>Camera" routine when I go to render anything as the default is "Use this Dialog." I do some work and long renders in v17 on a MacMini. The v17 Render to File window looks like this: The button names are not as revealing as your window shows. That's why I have never used them. Here is the preset file saved in v17, I think: 2001-slit-scan-Preset.pre Thanks for the EXR info. That experimentation will have to wait for another day. I want to explore your idea of a transparency map for the slit.
-
2001 Slit-Scan Effects Simulated in A:M? With MUFOOF?
fraizer replied to fraizer's topic in Work In Progress / Sweatbox
Thank you, Robert. Thank you, Fuchur. Banding -- a soft slit, that's an excellent idea. I will play with that. Not sure what a render "preset" is, other than the settings contained in the Cho file I posted. (I don't use Projects in my projects, that's why I posted individual files...). Re: EXR and exposure: A few years ago, I was working on a project with Rob Blalack and we discussed using EXR for something we were trying to do, but that's as far as it went; and that is the limit of my understanding of EXR -- very limited. I have found that a broad range of Keylight intensities works, with varying degrees of success; same is true for Pass and Blur values; to a large degree it is a matter of taste. I am very, very curious to know if there is another way to do the slit-scan technique in A:M without using MUFOOF... -
Recent YouTube wanderings led me to some videos about 2001, the making of the Star Gate sequence, and so on, which got me thinking… 2001 is among my all-time favorite movies. It is film qua film, not merely a novel thrown up on the screen. I saw 2001 at the Cinerama Theater in LA in 1968, with my college comrade and long-time friend, the late Robert Blalack, who received the VFX Oscar for Star Wars (1977). To say that we were mind-blown would be the understatement of understatements. These days, movie editing programs and software packages usually have some form of the slit-scan effect in their bags of tricks. But why use them when I might be able to re-create a virtual version of the Douglas Trumbull set-up in A:M? Down the rabbit hole I went with internet research on 2001, Trumbull, and slit-scan techniques. Trumbull set-up (details vary depending on source): Camera with open shutter on 15’ track. Slit-scan structure to support 4’ tall slit (I have not found width of slit documented anywhere) and Artwork moving behind slit; slit is just off-center (Trumbull has said there were 2 slits, one for the left pass, one for the right pass). Artwork greater than 4’ tall and as wide as you want to make it — many feet. Camera moves down track from 15’ away to 2” (or so) toward Slit/Artwork over a period of 1 minute while Artwork is moved approx. 8” horizontally; Trumbull mentions that the camera was panned slightly during this move. The result is one frame of exposed film, either the left half or right half of frame, depending. Rinse and repeat. First proof of concept in A:M: I made a simple model, a panel with a slit in it, to scale, and an artwork panel set just behind the slit. In the Cho, I placed the Camera 15’ away from the Slit-screen/Artwork model. I keyframed the camera to move toward the model while moving the artwork behind the slit. After rendering a series of frames, I composited the frames into a single frame and could see that I was getting something like the desired image stretch/smear of the slit-scan technique. So the approach sort of worked, but the method was tedious. How to “hold the shutter open” for a single frame during the camera move? Then I remembered the MUFOOF (Multiple Frames in Only One Frame) technique posted by Xtaz in 2005. As the Camera cannot be moved toward the Artwork within the MUFOOF action, I realized I would need to move the Slit-screen/Artwork model toward the Camera. I made an action to do that, did test renders, and got strange results. So I made an action that ran the set-up backward, moving the Slit-screen/Artwork model from 2” in front of the Camera to 15’ away, and got good, predictable results. Also, the Artwork cannot be moved within the MUFOOF action and have its new location available for the next frame. A second action is needed to move the Artwork between frames. I did many test renders of the backward MUFOOF Slit-screen/Artwork model move with Artwork moves between MUFOOF frames, while tweaking the Multi-Pass and Motion Blur values, and got some beautiful results. An example, using a 2 slit model: The light trails move, scintillate, but the dynamic acceleration characteristic of the Star Gate sequence was missing. The final ah-ha moment was realizing I could move the Slit-Screen model element across the Artwork as the model travels away from the Camera. That worked. Here is a wireframe of the set-up: Once I had a working slit-scan system, I wanted to see what actual 2001 artwork would produce. That artwork is long gone. But a couple of clever people have managed to deconstruct/reconstruct it through some coding wizardry. My 2001 Artwork was extracted from YouTube video https://www.youtube.com/watch?v=meEhkceeA94 and website https://www.seriss.com/people/erco/2001/ which reconstructed the original graphics by taking strips from each frame and placing them side by side. An example still from a render using the reconstructed artwork, left side of frame only: As my set-up has the slit on the left side of the model and the artwork moves from left to right and the Slit-screen/Artwork model moves away from the Camera, the rendered sequence moves away from the viewer unlike the actual Star Gate sequence. No matter. Modern movie editing software supports flipping sequences horizontally, vertically, and end-for-end. Here is the link to a short version of the Star Gate sequence as done in A:M, rendered at 720p and up-res’ed to 1080p, including a Ligeti-esque soundtrack: https://youtu.be/P4kflu1okxE Two issues with Multi-Pass that do not exist with real film emulsion: Brightness of image diminishes from outside edges inward as passes progress; I used high intensity values (2000 - 4000%) for the Keylight to compensate which causes a somewhat blown-out result; kind of OK because the overall effect in 2001 is blown-out. Banding from over-lapping passes; no complete remedy that I know of. Think of it as a feature, not a bug. High contrast artwork mitigates the issue somewhat. Here are the files: slit-scan-backward-indy-2001-artwork-60sec-01.chosingle-slit-screen-2001artwork-system01.mdldouble-slit-screen-backward-system-60sec.actdouble-slit-screen-backward-2001-artwork.act I am working on another slit-scan experiment using Mandelbrot Set artwork created by another college comrade who was also along for the 2001 ride back in 1968. I will post that item in the near future. Best to all.
-
Thanks, Robert. I was not sure this technique would work. When it did, I was very happy with the result. Opens up a lot of visual possibilities.
-
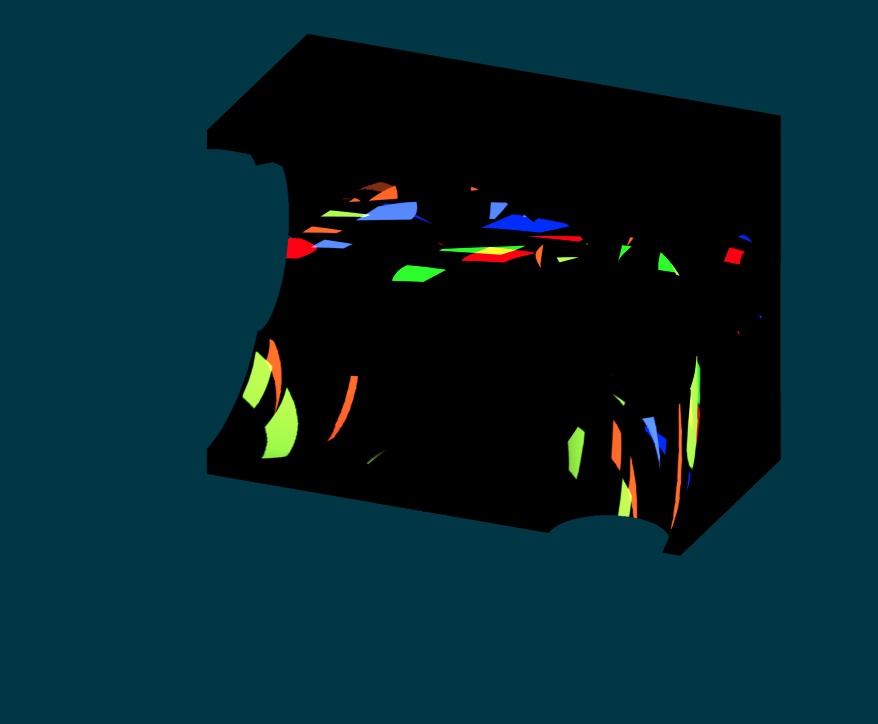
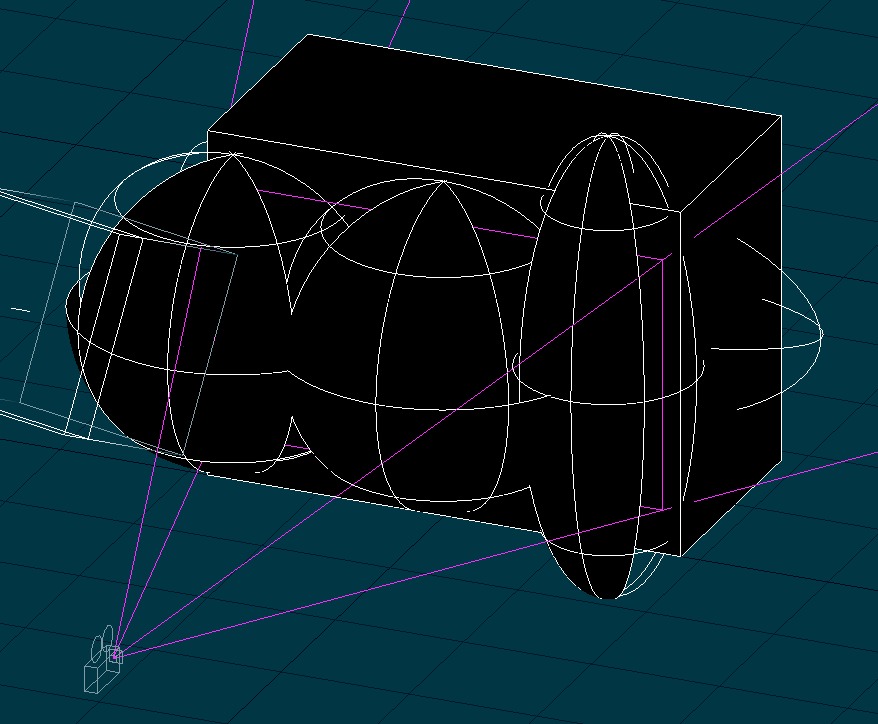
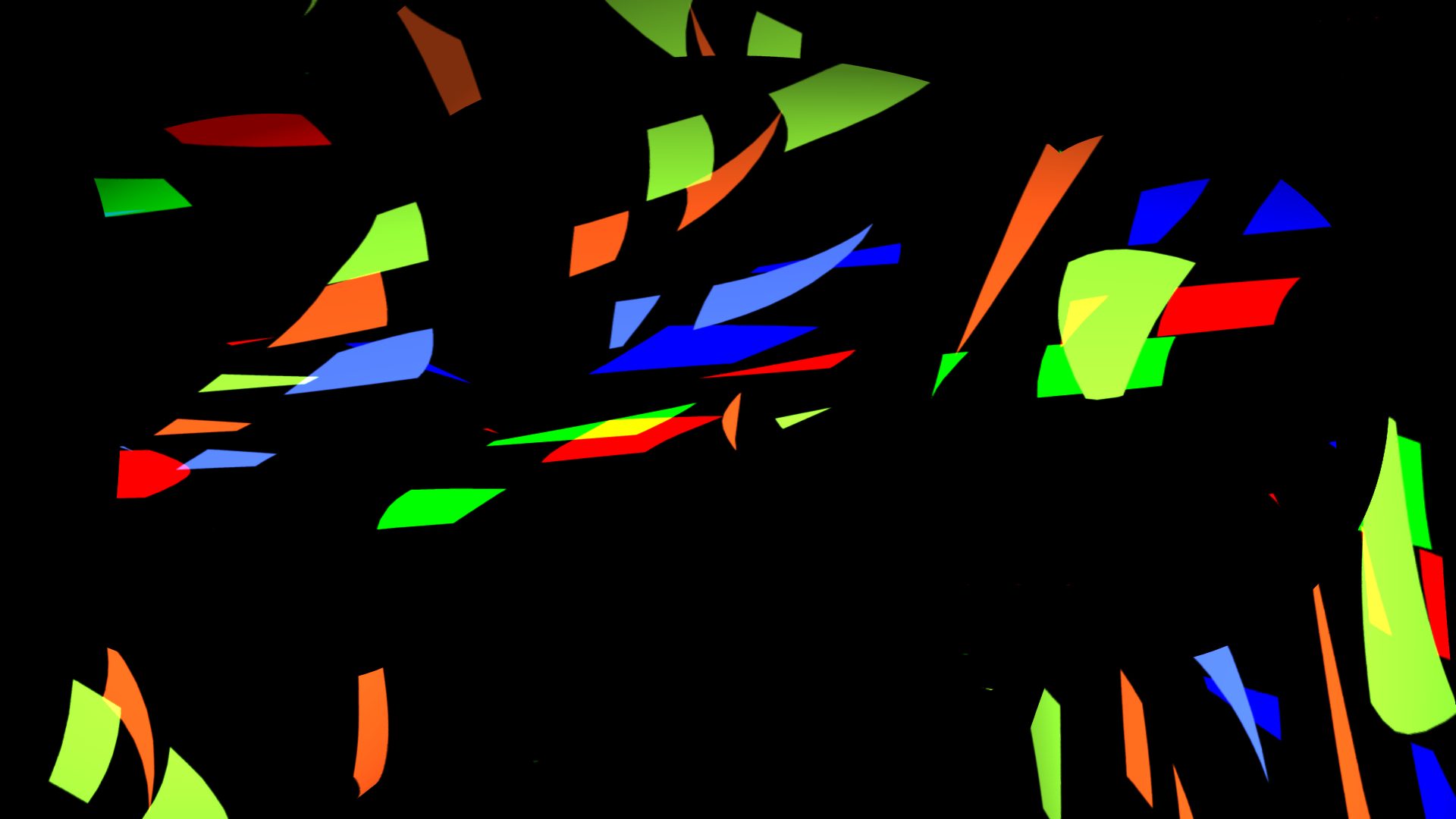
Third and perhaps final movie in the Prismatic series, Prismatic Dance is made from one video clip and an audio track. No sprites in this movie. The single model used in the choreography is a simple block shape with 4 spheres. The same light-box color pattern (TGA image sequence) from the other Prismatic movies is decaled onto each of the spheres. The spheres are Boolean cutters. As the spheres move, grow, and shrink over the course of the animation, they transfer the color patterns to the carved out surfaces of the block. Here is a wireframe/shaded birds-eye view of the cho 2 minutes into the animation: Here is a render of the same view showing the carving of the block: And the resulting frame rendered by the camera: The soundtrack is another generative music composition made in LogicPro. The piece uses the same orchestral instruments and effects processing as Fracture and Iris. It is in the Key of Eb Minor and has no accidentals. Each chord is made up of the 7 notes of the key, or in some cases 2 and even 3 octaves of notes. While this piece has a melodic/harmonic sound, it also has a darker, moody quality characteristic of Minor Keys. This piece has even more musical structure than Iris, created by resting groups of instruments over many bars — and even resting all instruments but one to force a solo effect. As with Fracture and Iris, a Probability Gate is applied to each note of each chord in each instrument track to determine whether or not a particular note will sound. Here is the YouTube link to Prismatic Dance: https://youtu.be/LLuu1to9EgM Best to all, Joseph
-
You got it, Robert. A small cheat to provide better definition of the iris by introducing a "pupil," a black circle that grows over the duration of the movie. It is composited on the top of the clip stack.
-
Similar to Prismatic Fracture, this movie is composited from two clips made in A:M. The first clip (the color pattern) is the same as was used in Fracture. It is used in four tracks in DaVinci Resolve. The bottom track is the base clip with Composite mode = Normal. Tracks 2, 3, and 4 are this clip image-flipped horizontally, vertically, and horizontally/vertically with Composite mode = Add to achieve a symmetrical image: The second clip (the black and white pattern) uses the same black-edged white square sprite as Fracture, but the emitter is a truncated cone. The resulting image has a large-scale symmetry while having an asymmetrical feel created by randomizing lifetime, size, orientation/spin, etc., of the sprites, and this not-quite-symmetrical sprite image breaks the symmetry of the color image: The sprite clip is on top of the color clips with Composite mode = Multiply. A frame from the final movie: The soundtrack is another generative music composition made in LogicPro. The piece uses the same orchestral instruments and effects processing as Fracture. It is written in the Key of C and has no accidentals. Each chord is made up of the 7 notes of the key, or in some cases 2 and even 3 octaves of notes. Unlike the atonal quality of Fracture, this piece has a melodic/harmonic sound. Additionally, I gave this piece more musical structure by resting groups of instruments over several/many bars at a time which creates a shifting density of sound as well as varying musical color/timbre. As with Fracture, a Probability Gate is applied to each note of each chord in each instrument track to determine whether or not a particular note will sound. If you are sensing a pattern here, you are correct. I have one more prismatic movie in the works. No sprites and a very different way of manipulating the color clip. Coming soon. Here is the YouTube link to Prismatic Iris: https://youtu.be/ENRd7JDjJJk Best to all, Joseph
-
Excellent. The graphic I was attempting to use as a cut-out was inspired by Matisse; I thought that would be a fun item to spin around with pretty colors. But way to complex to model. To your comment about the music, if you or anyone else is interested in more detail on the compositional method, please let me know.
-
Roger, thank you for your comment. There are a number of other movies on my YT channel that were made with A:M, all or in part. Please feel free to look around. Best. Robert, I will dig up the cookie-cut attempts and review. This work was done in v.17, the latest version I have. Should I send you a project file to test for the issue before posting a bug report? Perhaps v.19 does not have this problem. Or I just did not do something correctly... Joseph