pixmite
-
Posts
231 -
Joined
-
Last visited
pixmite's Achievements
Journeyman (4/10)
0
Reputation
-
Sorry - false alarm - I went 2 years back instead of one. guess I need to delete some old emails
-
Is version 18 incompatible with my version 17 web subscription? Version 18 asked for a license key upon startup. I tried the one that came with my version 17 subcription and it gives me the subscription expired message. What am I doing wrong please?
-
Choose "uncompressed" in the compression settings for AVI. That's the only off-the-shelf AVI codec that works with A:M. It will make a huge file. Recompressing to Quicktime with Quicktime Pro or in 32-bit A:M is recommended for web posting. Thanks that did the trick!

-
It's 17a - didn't know that there was a b, must have just come out
-
OK folks: I get a error message when I attempt to render an animation. I looked at all the settings I couldn't any place to set anything from 16 to 24 bit. Any ideas? As always, thanks in advance for any advice you can provide.
-
Thats exactly what I get. Its unfortunate, because the last reference material I have on how to use this product is a bit dated, verion 11
-
OK folks I've upgraded to version 17 and having a bit of problem with the help file installation. When I click “Help” sends me to a download link. So I download the file and unzip it into the main AM directory as per the instructions. Now when I click “Help” I get and errored browser page saying that it cannot get to the internet??? I think I'm missing something simple here. Can anyone enlighten me please? Thanks in advance for any advice you can give. Pixmite
-
Thanks everyone for the feedback. Some great suggestions.
-
Well that would work. Thanks for the tip! If use a pose to govern all eye lid and blink activity then I would not have the problem of making my chor action match the first frame of my external eye blink action. So in conclusion, I guess I'm trying to unnecessarily create an external action, i.e. keep it in the choreography. Other than a looping walk, is there any other type of actions that lend themselves to be saved separately? i.e are there any good guidelines on when to save an action externally vs. keeping it in the Choreography? Once again, thanks for any advice you can offer.
-
Fellow AMers: Question regarding Action vs. Choreography Actions. Which technique is better for something like a character eye-blink. Is it better to define them as part of the Choreography Action, or is it better create them separately, and then repeatedly sprinkle them into the Choreography (What I would assume is better). If it is better to create a non-chorography action then my question expands a little….. The eye lids of my model when I crafted it were set in the completely open position, i.e. the scarred look. This suggest to me that I’ll need to partially close the eye lids in the first frame of the choreography to exactly match the first frame of a potential eye blink for consistency. That sounds a bit klugey, especially if create any other eye lid movement before attempting to apply the external eye-blink action again. That being said, it makes it sound like an external eye-blink action is a bad idea. I must be missing something simple here; can anyone offer some advice on this? Thanks in advance for any eye opening wisdom you can impart
-
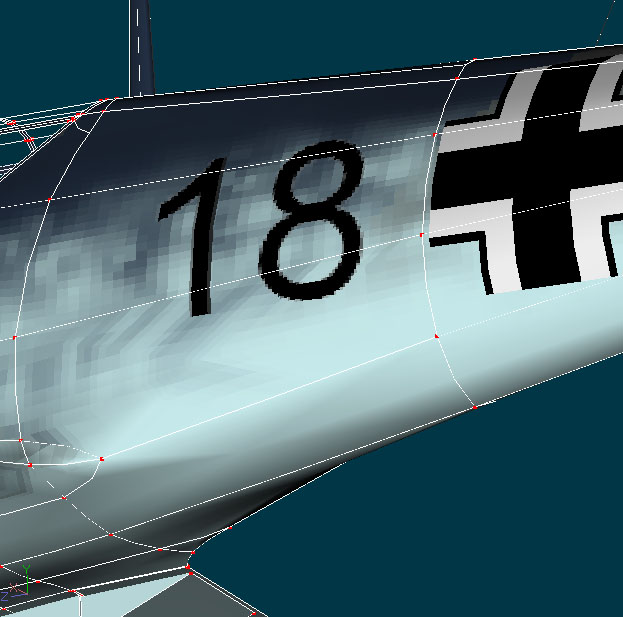
If you look closely at the picture associated with the quote above, you can see that some of my panel lines that are not vertical are a bit rough. I'm pretty sure that this is due to the resolution of my panel line image not being high enough so that the anti-aliasing is visible on the model when rendered. This can also be seen around the edges of the number “18” decal. Does anyone have a good rule of thumb on establishing the necessary resolution of an image applied to a decal stamp to make the anti-aliasing of the decal not noticeable when rendered? Example: If my decal Stamp is 3” X 5” then the image applied to the stamp should be 12” X 15” to hide all anti-aliasing, i.e. a ratio of 3 to 1. Pixmite
-
All here's the TA-DA pic. Its a new Bump decal where no stamps were scaled in the UV editor. Note that you can still see the jags on the color decal, I haven't created a non-scaled stamp version of that one yet. Pixmite
-
Fellow AMers: Thanks for all your suggestions; they were a great help to discover what the underlining (no pun intended) problem was. I did some further experimenting last night. First, I did try the bump decal set for cylindrical mapping, which didn’t work. Next I tried a fresh decal that I quickly created and it worked great! So I said to myself… Self what beep beep is going on here??? Well…. When I originally stated that I didn’t edit the points in the UV editor after a stamped the decal wasn’t completely accurate. Following the Zandoria Decal Tutorial, I was maximizing the real estate of my blank decal by selecting the entire CP group of the two fuselage stamps together, scaled them up and moved them to a more strategic location on the decal in the UV editor. While performing my quick test above, I neither moved nor scaled the complete stamps. Upon further experimenting moving the stamps where found to not cause the problem, but scaling the Stamps did. So the moral of the story is…. DO NOT SCALE COMPLICATED COMPOUND CURVE SPLINE GEOMETRY IN THE UV EDITOR! Lastly, if you look closely at the camouflage decal of the first image posted above you can see that it affected it as well. I also up-scaled the CPs of this Stamp in the UV editor when I created it. Does this sound like a bug or just me not understand the limitations of the UV editor? Once again, thanks everyone for your suggestions, you we all were a great help! Pixmite
-
Below is the shaded wire frame version. Some of the area in question has a 5-point patch or a hook but not all of the problem area???? I'd prefer not to have to model all of the panel lines if possible. A cylindrical map might work for all the vertical lines, but I'll probably need another decal for the horizontal ones. I'll give it a try and report back to this thread. As for setting the bump % to -100, this is done at the decal level, to fix my problem it would have to be done at the Stamp level. Lastly, I would tend to agree that this is a bug, if a color decal doesn't have any problems why should a bump map? Pixmite
-
This is a continuation of a topic started here: http://www.hash.com/forums/index.php?showtopic=18978 Below is an Image of my model to which I applied a bump decal with straight lines which render with jags. The decal is un-edited in the UV editor. No points were dragged or the model flattened. Any ideas on how to fix this? or a better approach to straight lines? Pixmite P.S. Vernon - I think you were right about the optical illusion. I rendered it from another couple of angles and it looked correct. I was late, what can I say.